课程介绍
有的章节有作业,参考对应章节和 https://pages.cs.wisc.edu/~remzi/OSTEP/Homework/homework.html 。作业都是通过 Python 仿真模拟一个简单的操作系统的功能。
- 4
- 13
- 26
- 27
- 36
4 The Abstraction: The Process
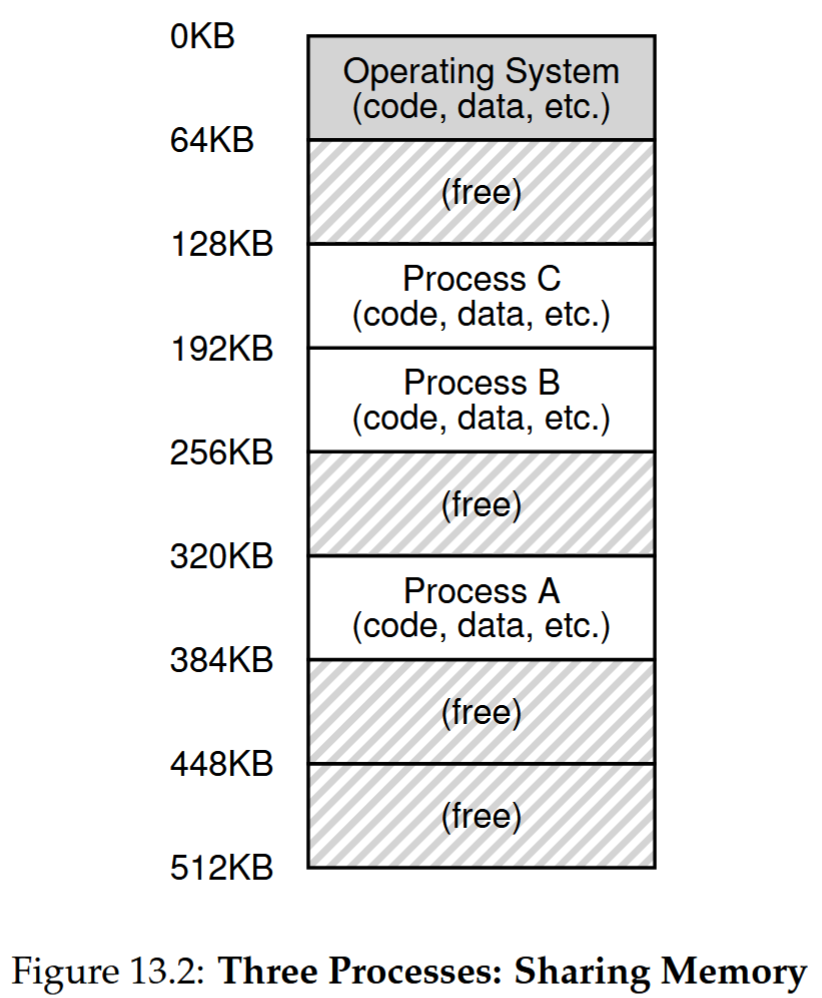
The OS’s core abstraction: the process (a running program, distinct from static on-disk programs). To let users run multiple programs simultaneously, the OS uses CPU virtualization via time sharing (alternating processes on physical CPUs) to create the illusion of many virtual CPUs, with potential performance costs from sharing. Key OS components for this are mechanisms (low-level tools like context switches to switch processes) and policies (algorithms for decisions like which process to run next, using history/workload/performance metrics).
A process’s state includes its address space (memory for code/data), registers (e.g., program counter (PC) for next instruction, stack pointer and associated frame pointer to manage the stack for the function parameters, local variables, and return addresses), and I/O info (open files). The Process API covers creating/destroying processes, waiting for them, suspending/resuming, and checking status.
Process creation involves loading code/static data into memory (eagerly in simple OSes, lazily in modern ones), allocating run-time stack (or just stack, for locals/parameters) and heap (for dynamic data), initializing I/O (e.g., 3 default file descriptors in UNIX), and starting execution at main().
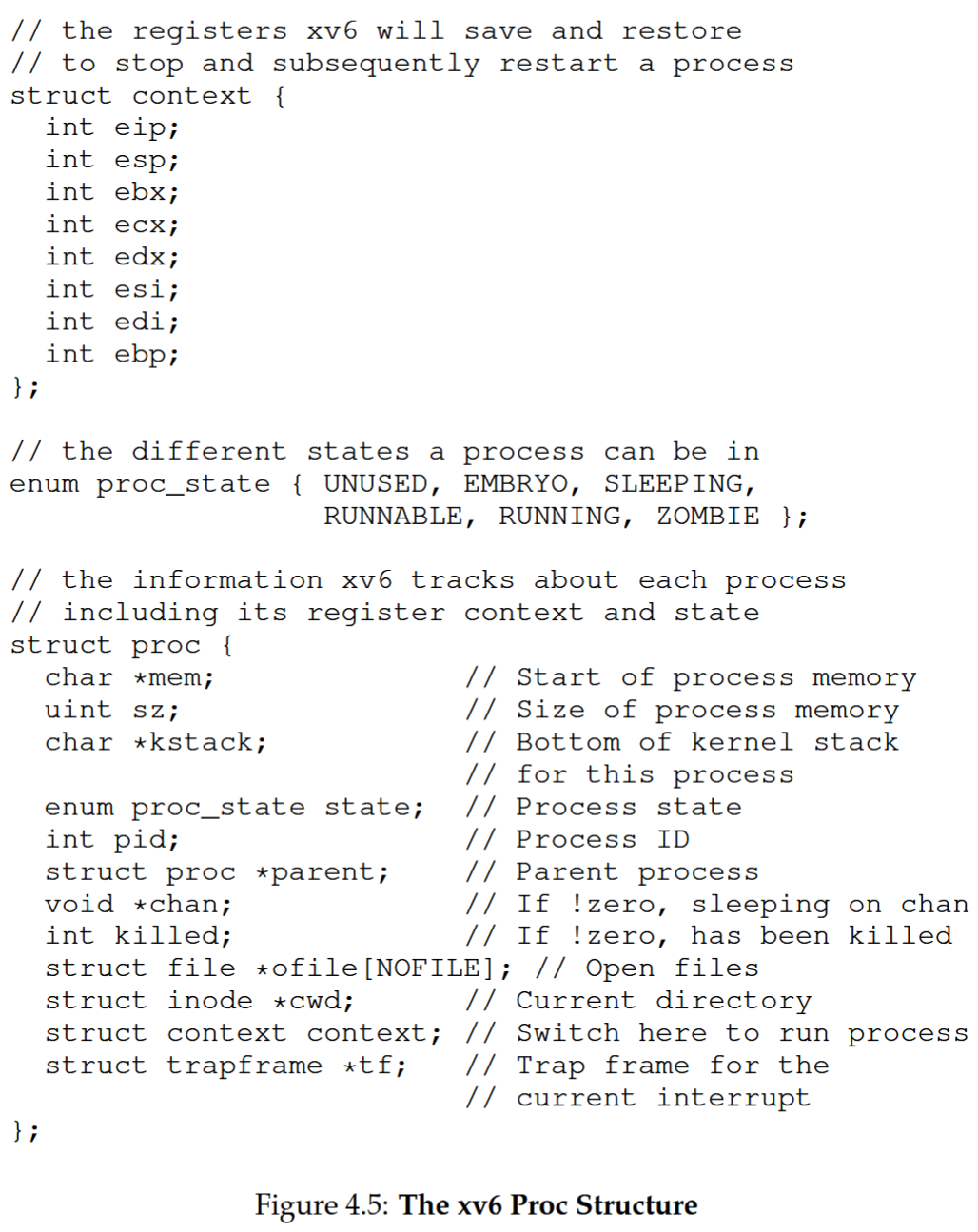
Processes have 3 core states: Running (executing instructions), Ready (ready but not running), Blocked (waiting for events like I/O, then returning to Ready). The OS uses data structures (e.g., xv6’s proc struct) to track processes—storing state, registers, memory, PID, open files, etc.—via a process list (with Process Control Blocks).
ASIDE: KEY PROCESS TERMS
- The process is the major OS abstraction of a running program. At any point in time, the process can be described by its state: the contents of memory in its address space, the contents of CPU registers (including the program counter and stack pointer, among others), and information about I/O (such as open files which can be read or written).
- The process API consists of calls programs can make related to processes. Typically, this includes creation, destruction, and other useful calls.
- Processes exist in one of many different process states, including running, ready to run, and blocked. Different events (e.g., getting scheduled or descheduled, or waiting for an I/O to complete) transition a process from one of these states to the other.
- A process list contains information about all processes in the system. Each entry is found in what is sometimes called a process control block (PCB), which is really just a structure that contains information about a specific process.
13 The Abstraction: Address Spaces
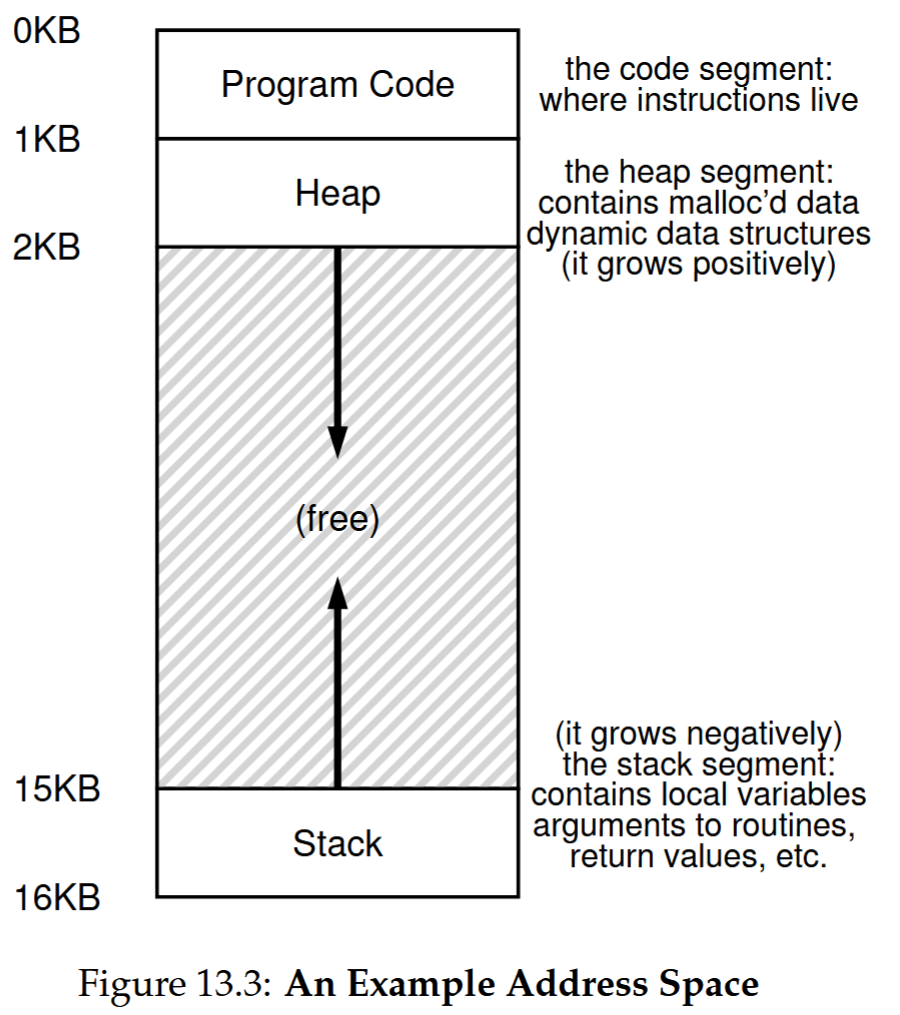
The OS provides memory virtualization with address space (a running program’s view of its memory) as the core abstraction—address space includes the static code segment (instructions of the program), expandable heap segment (dynamically-allocated, user-managed memory like malloc()), and expandable stack segment (to keep track of where the program is in the function call chain as well as to allocate local variables and pass parameters and return values to and from routines.).
The virtual memory (VM) system realizes memory virtualization by translating virtual addresses (visible to users) to physical addresses (real memory locations). The VM system is responsible for providing the illusion of a large, sparse, private address space to each running program; each virtual address space contains all of a program’s instructions and data, which can be referenced by the program via virtual addresses.
VM follows three goals: transparency (invisible to programs), efficiency (low time/space overhead, relying on hardware like TLBs), and protection (preventing cross-process/OS memory access). Isolation (key for reliability) is enabled by protection. VM relies on mechanisms (e.g., address translation) and policies (e.g., memory eviction) to function.
Concurrency
26 Concurrency: An Introduction
Threads is a concurrency abstraction within a single process, which are execution points in a process—multi-threaded processes have multiple PCs, share an address space (enabling easy data sharing), and each has private registers.
The state of each thread is stored in Thread Control Blocks/TCBs. Thread context switches are lighter than process switches (no page table changes) but require saving/restoring registers. Unlike single-threaded processes (one stack), multi-threaded ones have one stack per thread (thread-local storage).
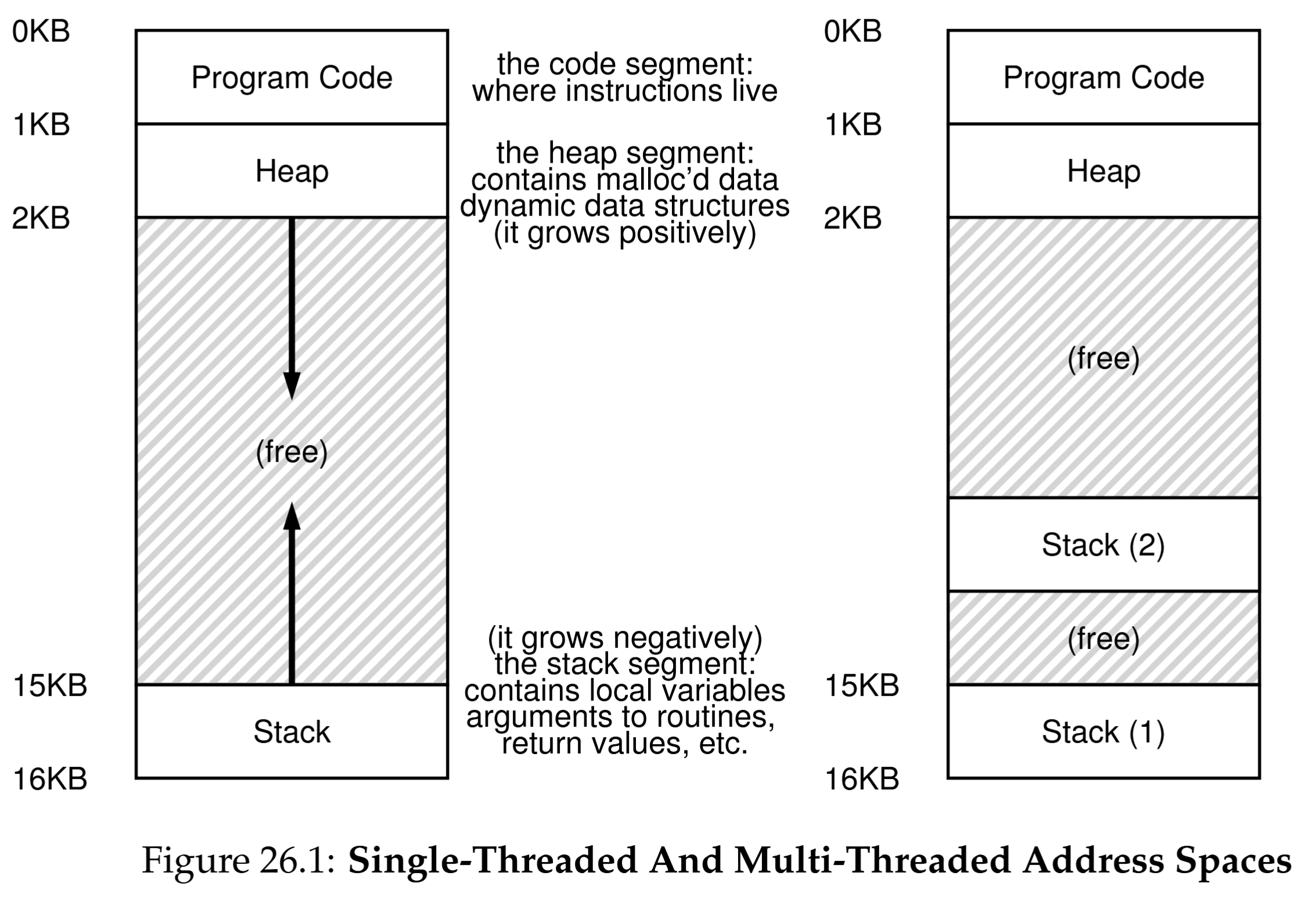
In this figure, you can see two stacks spread throughout the address space of the process. Thus, any stack-allocated variables, parameters, return values, and other things that we put on the stack will be placed in what is sometimes called thread-local storage, i.e., the stack of the relevant thread.
Two key reasons to use threads are parallelism (using multiple CPUs to speed up tasks like array operations) and avoiding I/O blocking (letting other threads run while one waits for I/O, critical for servers).
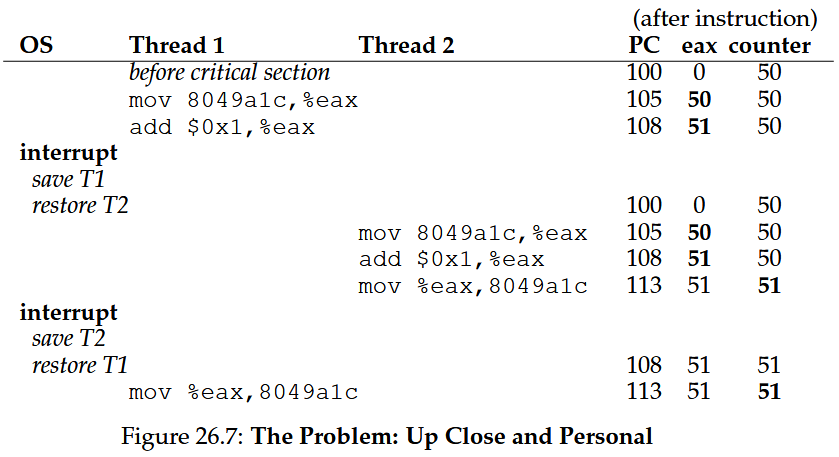
A major issue arises with shared data: threads updating a shared variable (e.g., a counter) often yield incorrect results due to race conditions—outcomes depend on execution timing, caused by non-atomic instruction sequences (e.g., loading, incrementing, storing a counter). The core of race conditions are the uncontrolled scheduling of the instructions.
See also
threads-intro
ASIDE: KEY CONCURRENCY TERMS CRITICAL SECTION, RACE CONDITION, INDETERMINATE, MUTUAL EXCLUSION
- A critical section is a piece of code that accesses a shared resource, usually a variable or data structure.
- A race condition (or data race [NM92]) arises if multiple threads of execution enter the critical section at roughly the same time; both attempt to update the shared data structure, leading to a surprising (and perhaps undesirable) outcome.
- An indeterminate program consists of one or more race conditions; the output of the program varies from run to run, depending on which threads ran when. The outcome is thus not deterministic, something we usually expect from computer systems.
- To avoid these problems, threads should use some kind of mutual exclusion primitives; doing so guarantees that only a single thread ever enters a critical section, thus avoiding races, and resulting in deterministic program outputs.
27 Interlude: Thread API
ASIDE: THREAD API GUIDELINES
There are a number of small but important things to remember when you use the POSIX thread library (or really, any thread library) to build a multi-threaded program. They are:
- Keep it simple. Above all else, any code to lock or signal between threads should be as simple as possible. Tricky thread interactions lead to bugs.
- Minimize thread interactions. Try to keep the number of ways in which threads interact to a minimum. Each interaction should be carefully thought out and constructed with tried and true approaches (many of which we will learn about in the coming chapters).
- Initialize locks and condition variables. Failure to do so will lead to code that sometimes works and sometimes fails in very strange ways.
- Check your return codes. Of course, in any C and UNIX programming you do, you should be checking each and every return code, and it’s true here as well. Failure to do so will lead to bizarre and hard to understand behavior, making you likely to (a) scream, (b) pull some of your hair out, or (c) both.
- Be careful with how you pass arguments to, and return values from, threads. In particular, any time you are passing a reference to a variable allocated on the stack, you are probably doing something wrong.
- Each thread has its own stack. As related to the point above, please remember that each thread has its own stack. Thus, if you have a locally-allocated variable inside of some function a thread is executing, it is essentially private to that thread; no other thread can (easily) access it. To share data between threads, the values must be in the heap or otherwise some locale that is globally accessible.
- Always use condition variables to signal between threads. While it is often tempting to use a simple flag, don’t do it.
- Use the manual pages. On Linux, in particular, the pthread man pages are highly informative and discuss many of the nuances presented here, often in even more detail. Read them carefully!
28 Locks
The basic ideas
Locks
Programmers annotate source code with locks, putting them around critical sections, and thus ensure that any such critical section executes as if it were a single atomic instruction.
A lock is just a variable, and thus to use one, you must declare a lock variable of some kind (such as mutex above). This lock variable (or just “lock” for short) holds the state of the lock at any instant in time. It is either available (or unlocked or free) and thus no thread holds the lock, or acquired (or locked or held), and thus exactly one thread holds the lock and presumably is in a critical section.
Locks provide some minimal amount of control over scheduling to programmers by guaranteeing that no more than a single thread can ever be active within the critical region.
The name that the POSIX library uses for a lock is a mutex, as it is used to provide mutual exclusion between threads, i.e., if one thread is in the critical section, it excludes the others from entering until it has completed the section.
Building locks (needing hardware/OS support, using hardware primitives) and evaluating them via mutual exclusion, fairness (no starvation), and performance (various scenarios).
Failed attempts
For single-processor systems, disabling interrupts (via hardware instructions) pre-critical section and enabling post- ensures atomic execution, a simple early mutual exclusion solution.
Disabling interrupts for critical sections (single-processor, simple) ensures atomic execution but has flaws—needs trusting apps (abuse risk), fails on multiprocessors, and may lose interrupts causing system issues. Interrupt-off is limited for mutual exclusion, e.g., OS uses it for data atomicity/avoiding mess.
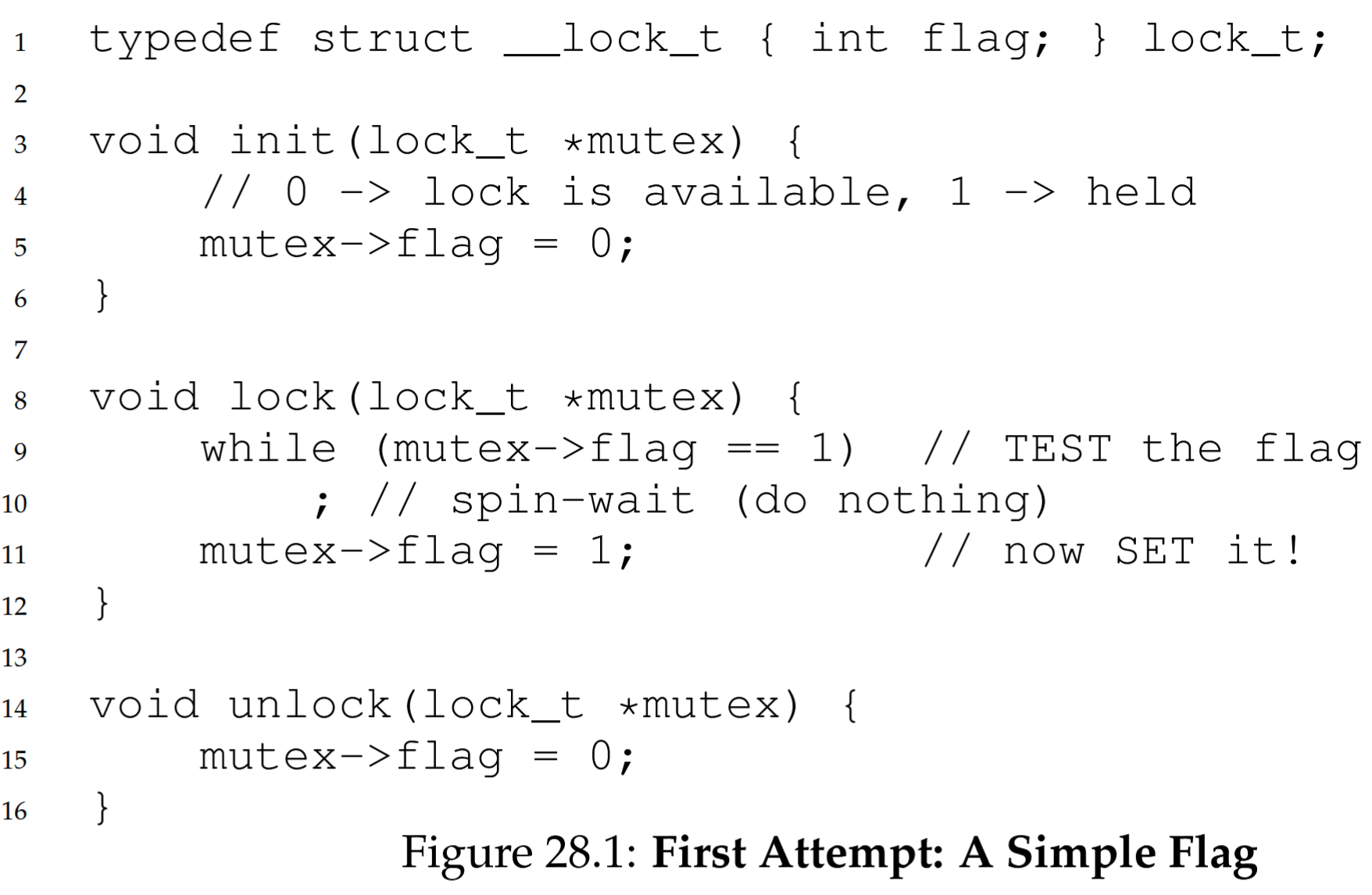
With a simple lock using a flag variable, threads use lock() to check if the flag is 1 (not initially), set it to 1 to hold the lock, and unlock() to clear it. A second thread spins in a loop if the flag is 1, but normal loads/stores make this insufficient.
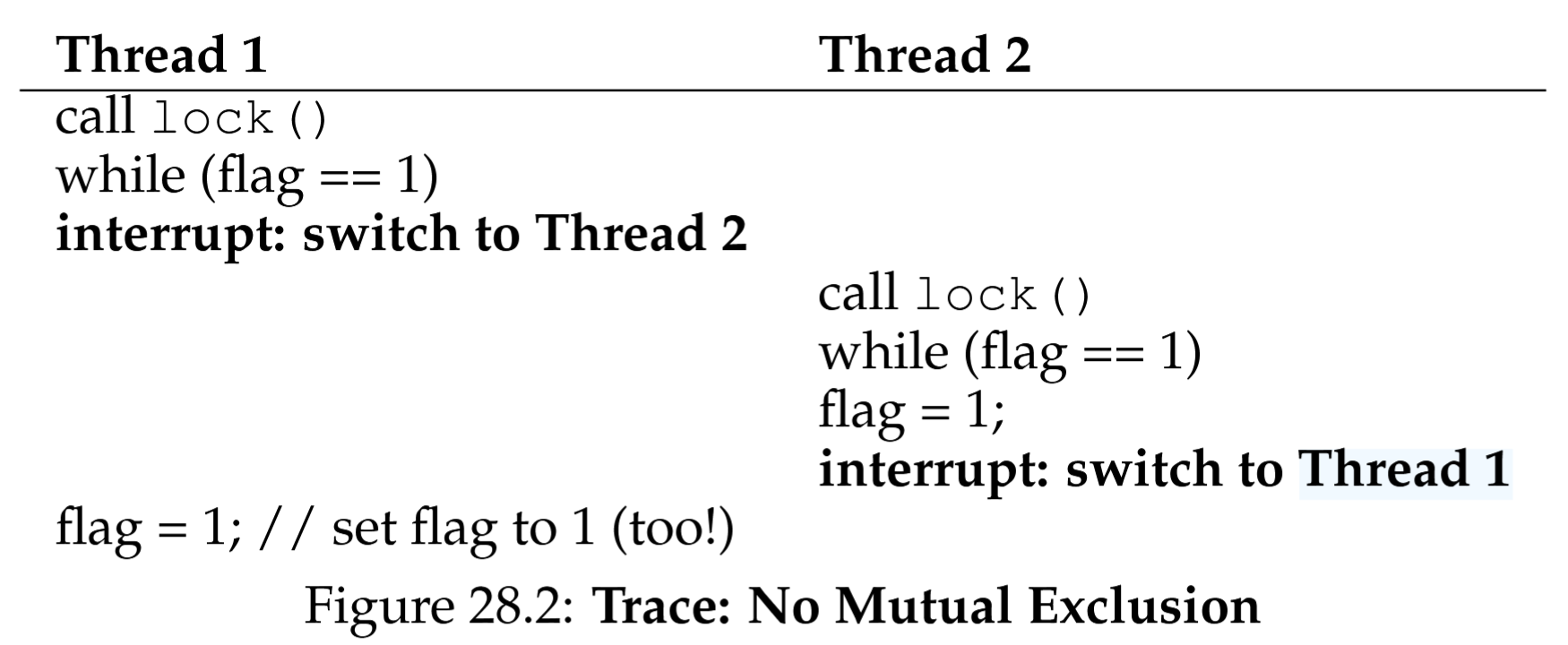
The code has correctness (both threads enter critical sections due to bad interleaving, no mutual exclusion) and performance (spin-waiting wastes time) issues.